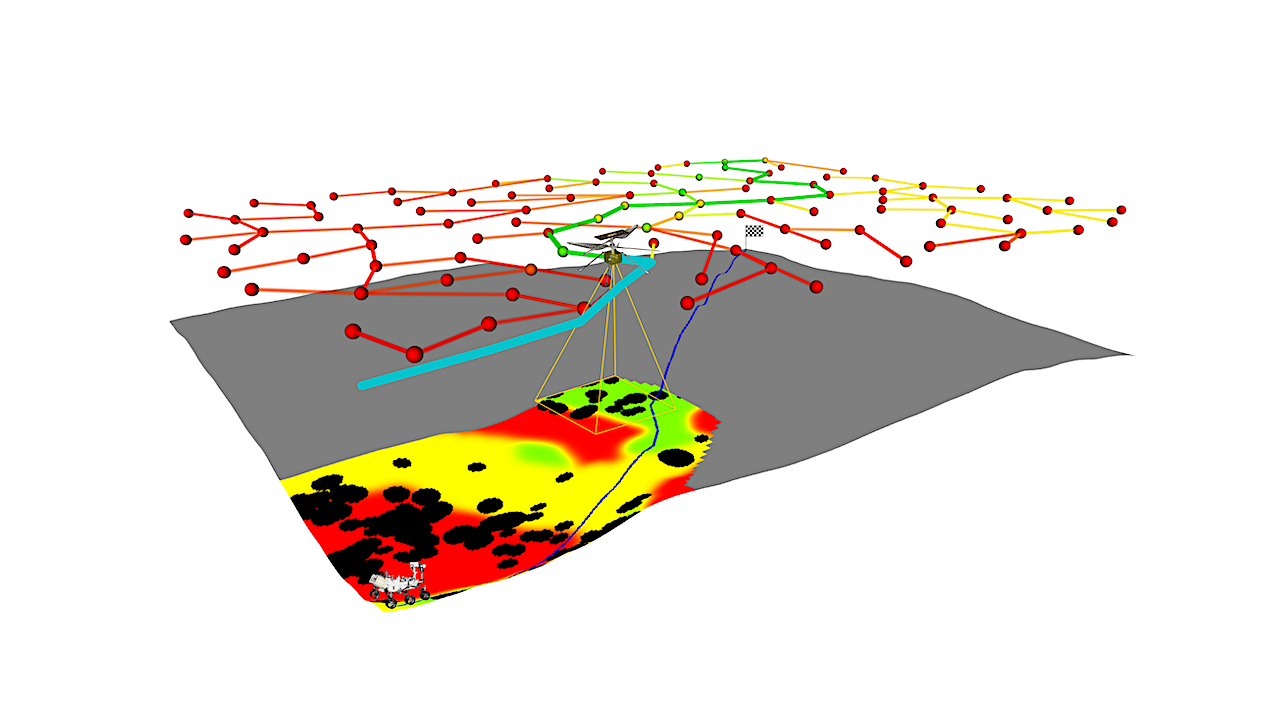
Illustration de notre problème et de notre approche. Un robot suiveur (par exemple un rover, en bas) doit traverser un espace inconnu pour atteindre un objectif (en haut) tout en minimisant le coût de traversée (couleur du sol, du rouge = élevé au vert = faible). L’objectif est qu’un robot de reconnaissance (par exemple un MAV) explore la scène de telle sorte que le chemin du suiveur soit optimal. Notre approche génère un chemin de suivi optimiste (bleu) guidant le PPI de reconnaissance. À titre d’illustration, des échantillons de PPI épars sont représentés en couleur par gain d’information (colorés du rouge = faible au vert = élevé), avec le chemin passé (sarcelle) et actuellement prévu (vert) du scout. — cs.RO
La capacité à traverser un environnement inconnu est essentielle pour les opérations robotiques autonomes. Cependant, en raison des capacités de détection limitées et des contraintes du système, aborder ce problème avec un seul agent robotique peut s’avérer lent, coûteux et dangereux.
Par exemple, dans les missions d’exploration planétaire, l’usure des roues d’un rover due à un terrain abrasif doit être minimisée à tout prix, car les réparations sont impossibles. D’un autre côté, l’utilisation d’un robot de reconnaissance tel qu’un micro-véhicule aérien (MAV) a le potentiel de réduire l’usure et les coûts de temps et d’augmenter la sécurité d’un robot suiveur.
Ce travail propose un nouveau cadre coopératif IPP qui permet à un éclaireur (par exemple, un MAV) d’explorer efficacement le chemin à coût minimum pour qu’un suiveur (par exemple, un rover) atteigne son objectif. Nous déduisons des garanties théoriques pour notre algorithme et prouvons que l’algorithme se termine toujours, trouve toujours le chemin optimal s’il existe et se termine tôt lorsque le chemin trouvé s’avère optimal ou irréalisable.
Nous démontrons, par une évaluation expérimentale approfondie, que les garanties sont valables dans la pratique et que notre algorithme est 22,5 % plus rapide pour trouver le chemin optimal et 15 % plus rapide pour terminer par rapport aux méthodes existantes.
Friedrich M. Rockenbauer, Jaeyoung Lim, Marcus G. Müller, Roland Siegwart, Lukas Schmid
Commentaires : 8 pages, 9 figures, le code sera disponible à cette URL https
Matières : Robotique (cs.RO)
Citer comme : arXiv:2406.05313 [cs.RO] (ou arXiv:2406.05313v2 [cs.RO] pour cette version)
https://doi.org/10.48550/arXiv.2406.05313
Concentrez-vous pour en savoir plus
Historique des soumissions
De : Jaeyoung Lim
[v1] Samedi 8 juin 2024 01:10:22 UTC (12 076 Ko)
[v2] Mercredi 12 juin 2024 11:41:17 UTC (12 077 Ko)
https://arxiv.org/abs/2406.05313
Astrobiologie,
2024-07-19 15:07:45
1721391851
#Traverser #Mars #planification #coopérative #informative #des #itinéraires #pour #naviguer #efficacement #dans #des #scènes #inconnues